GPS and base station positioning technologies basically meet the needs of users for location services in outdoor scenarios. However, 80% of people's lives are spent indoors. A large number of positioning requirements such as individual users, service robots, and new IoT devices also occur indoors. Indoor scenes are blocked by buildings, and GNSS signals are fast. Attenuation, or even complete rejection, does not meet the needs of navigation and positioning in indoor scenes. In recent years, the related technologies and industries of location services are developing from the outdoors to the interior to provide ubiquitous location-based services. The main driving force is the huge application and commercial potential of indoor location services. .

As early as the 15th century, when humans began to explore the ocean, positioning technology was also born. At that time, the positioning method was very rough, that is, using a nautical chart and a star map to determine its position.
With the advancement of society and the development of science and technology, positioning technology has achieved qualitative leap in terms of technical means, positioning accuracy, and usability, and has gradually evolved from "high on the sea" such as navigation, aerospace, aviation, surveying, military, and natural disaster prevention. The field gradually penetrates into every aspect of social life and becomes an indispensable and important application in people's daily life – such as personnel search, location search, traffic management, vehicle navigation and route planning, etc...
In general, the positioning can be divided into two categories: indoor positioning and outdoor positioning according to different usage scenarios. Because the scenarios are different, the requirements are different, so the positioning technologies adopted separately are not the same.
Mature outdoor positioning technologyAt present, mainstream technologies applied to outdoor positioning mainly include satellite positioning and base station positioning.
Satellite positioning
Satellite positioning is carried out by receiving latitude and longitude coordinate signals provided by satellites. The satellite positioning systems mainly include: US Global Positioning System (GPS), Russian GLONASS, European Galileo (GALILEO) system, China Beidou satellite navigation The system, in which the GPS system is the most widely used and most mature satellite positioning technology at this stage.

The GPS Global Positioning System consists of three parts: the space part, the ground control part, and the user equipment part.
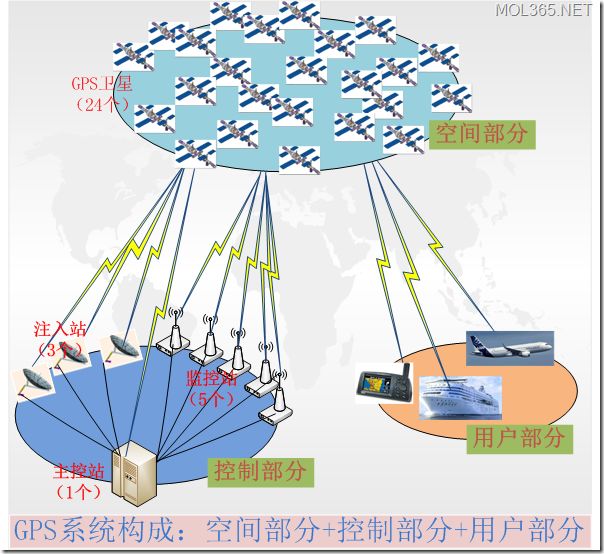
The space is composed of 24 working satellites, which are evenly distributed over 6 orbital planes (4 per orbital plane). The distribution of satellites allows more than 4 satellites to be observed anywhere in the world and at any time. A geometric image that maintains good positioning resolution accuracy;
The control part is mainly composed of a monitoring station, a main control station, an alternate main control station and an information injection station, and is mainly responsible for the management and control of the GPS satellite array;
The user equipment part is mainly a GPS receiver. The main function is to receive signals transmitted by GPS satellites, obtain positioning information and observation, and realize positioning by data processing.
The principle of GPS positioning is to determine the position of the GPS receiver through four satellites at known locations.
To achieve this, the position of the satellite can be detected in the satellite ephemeris based on the time recorded by the onboard clock. The distance from the user to the satellite is recorded by the satellite signal to the time elapsed by the user, and then multiplied by the speed of light (due to the interference of the ionosphere of the atmosphere, this distance is not the true distance between the user and the satellite, but Pseudorange).
When the GPS satellite is working normally, the navigation message is continuously transmitted with a pseudo-random code (referred to as a pseudo code) composed of 1 and 0 binary symbols. The navigation message includes information such as satellite ephemeris, working conditions, clock correction, ionospheric delay correction, and atmospheric refraction correction. However, since the clock used by the user acceptor is not always synchronized with the satellite onboard clock, in addition to the user's three-dimensional coordinates x, y, z, a variable t, ie the time difference between the satellite and the receiver, is introduced as an unknown. Then solve the four unknowns with four equations. So if you want to know where the receiver is, you must be able to receive at least 4 satellite signals. As shown below:

Figure: GPS positioning principle
Although satellite positioning has high precision and wide coverage, it is expensive and consumes a lot of power, and is not suitable for all users.
2. Base station positioning
The base station location is generally applied to mobile phone users. The mobile phone base station location service is also called Location Based Service (LBS), which acquires the location information of the mobile terminal user through the network of the telecommunication mobile operator (such as the GSM network).
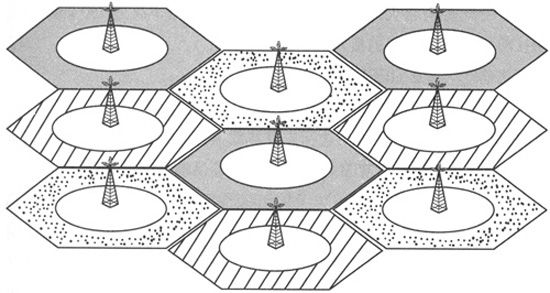
After the mobile device such as a mobile phone is turned on, it will actively search for the surrounding base station information and establish contact with the base station, and in the area where the signal can be searched, the mobile phone can search for more than one base station, but the degree of the near and far is different, and then When communicating, the base station with the closest distance and the strongest signal is selected as the communication base station. The remaining base stations are not useless. When your location moves, the signal strength of different base stations will change. If the signal of base station A is not as good as that of base station B, the mobile phone will first perform with base station B in order to prevent sudden interruption of the link. Communication, after coordinating the communication method, will switch from A to B. This is why the same day of standby, you have more power on the train than at home, the phone needs to constantly search and connect to the base station.
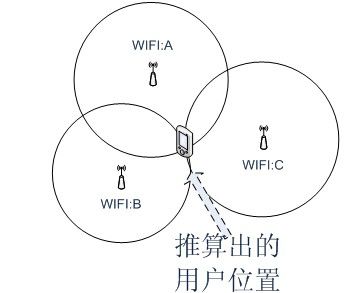
The principle of base station positioning is also very simple: we know that the farther away from the base station, the worse the signal, according to the signal strength received by the mobile phone, the distance from the base station can be roughly estimated, when the mobile phone simultaneously searches for signals of at least three base stations (now Network coverage is a very easy thing), it can roughly estimate the distance from the base station; the base station is uniquely determined in the mobile network, and its geographical location is also unique, so that three base stations (three points) can be obtained. The distance from the mobile phone, according to the principle of three-point positioning, only needs to take the base station as the center, and the distance is a circle for multiple times. The intersection of these circles is the position of the mobile phone.
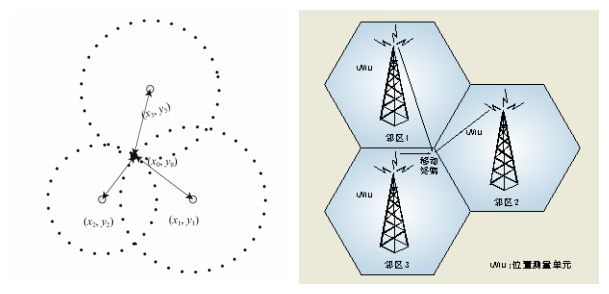
Figure: Base station "three-point positioning" principle
Since the signal is easily interfered when the base station is positioned, it inevitably determines the inaccuracy of its positioning. The accuracy is about 150 meters, and it is basically impossible to navigate. The positioning condition is that the mobile phone is in the sim card registration state (the wifi card is opened in the flight mode and the sim card is unplugged), and the signals of the three base stations must be received, whether indoors or not. However, the positioning speed is extremely fast, and once the signal is available, it can be positioned. The main purpose is to quickly and generally understand your position without GPS and without wifi.
Table: Comparison of two outdoor positioning technologies
| Positioning Technology | GPS positioning | LBS positioning |
| principle | Satellite positioning | Base station positioning |
| Precision | High precision (5-10m) | Low precision (20-200m in urban areas; 1000-2000m in suburbs) |
| power consumption | Very large, need a mobile phone to provide high voltage power for the GPS module | The base station can collect data without consuming the power of the mobile phone. |
| advantage | High outdoor positioning accuracy; wide coverage | Fast positioning speed; free from weather, high buildings, location, etc.; low power consumption |
| Disadvantage | 1. The antenna of the GPS system must be outdoors and can see a large area of ​​the sky, otherwise it can not be positioned, and it is greatly affected by the weather and location; 2. It is more power-consuming; 3. Higher cost | 1. The positioning condition is that the mobile phone is in the sim card registration state at the location where the base station signal is present, and the signals of the three base stations must be received; 2. The positioning accuracy is low. |
GPS and base station positioning technologies basically meet the needs of users for location services in outdoor scenarios. However, 80% of people's lives are spent indoors. A large number of positioning requirements such as individual users, service robots, and new IoT devices also occur indoors. Indoor scenes are blocked by buildings, and GNSS signals are fast. Attenuation, or even complete rejection, does not meet the needs of navigation and positioning in indoor scenes.
In recent years, related technologies and industries for location services are evolving from the outdoors to the interior to provide ubiquitous location-based services, the main driving force of which is the enormous application and commercial potential of indoor location services. Many companies, including OS providers, service providers, device and chip providers, are competing in this market.

1. Indoor positioning application
Indoor positioning is the technical means to know the real-time location or trajectory of people in the room. Based on this information, a variety of applications can be implemented.
Merchants in large-scale shopping malls can use indoor positioning technology to know which places have the most traffic, and which action routes are usually selected by guests, so as to more scientifically arrange counters or choose venues for promotions.
You can also use the indoor positioning technology to find the area where you want to buy the item and get the best route to it.
Parents no longer have to worry about their children losing in the mall, and they can locate their children in real time through indoor positioning technology.
The company's managers can use the indoor positioning technology to know the status of the indoor personnel in real time, so as to better optimize the use of air conditioners, achieve the purpose of energy saving and emission reduction, and effectively improve the level of safety and security.
By deploying indoor positioning technology, telecom operators can better find the "blind spots" and "hot spots" areas of indoor coverage, and better provide communication services for users indoors.
......
2. The challenge of indoor positioning
Compared with outdoor positioning, indoor positioning faces many unique challenges. For example, the indoor environment is very dynamic and can be said to be diverse. Different buildings have different indoor layouts; the indoor environment is more elaborate, and thus More precision is needed to distinguish between different features.
So practical indoor positioning solutions need to meet those requirements? The main aspects include: accuracy, coverage, reliability, cost, power consumption, scalability and response time.
Accuracy: Applications with different requirements for precision vary widely. For example, finding a specific product in a supermarket or warehouse may require an accuracy of 1 meter or less. If you are looking for a specific brand or restaurant in a shopping mall, 5-10 meters. Accuracy can meet the requirements.
Coverage: Coverage mainly refers to the extent to which a technology and solution can provide coverage that meets accuracy. Some technologies require corresponding or dedicated infrastructure support and use in conjunction with the corresponding positioning terminal, so that its coverage is only the context of the corresponding technology.
Reliability: As mentioned above, the indoor environment is very dynamic and will change frequently. For example, the settings and partitions of the mall will change frequently. On the other hand, the infrastructure on which the positioning depends will also change frequently. For example, in some large conferences, exhibitors will set up their own WiFi hotspots. These facilities will change their location dynamically, sometimes even sometimes. If the positioning technology is based on WiFi, reliable systems should not be affected by these factors.
Cost and complexity: Cost and complexity metrics cover two aspects. One is the cost of locating the terminal, can you use the hardware already in the terminal without adding new hardware. On the other hand, the cost and complexity of layout and maintenance, including the facilities and collection-related databases required for layout and maintenance positioning.
Power consumption: The power consumption generated by positioning is an important indicator. Especially for mobile devices that use batteries, if the power consumption is too large, the device will be out of power, which limits the user's use. Some surveys have shown that battery consumption is a major factor that many users do not turn on the positioning function. Therefore, if you want to achieve location awareness anytime, anywhere, you must reduce the additional power consumption of the device added by positioning.
Scalability: Scalability refers to the ability of a solution to scale to greater coverage and the ability to easily port to different environments and applications.
Response time: The time required for the system to give a location update is the response time. Different application requirements are different. For example, mobile users and navigation applications need fast location updates.
Flourishing indoor positioning technology
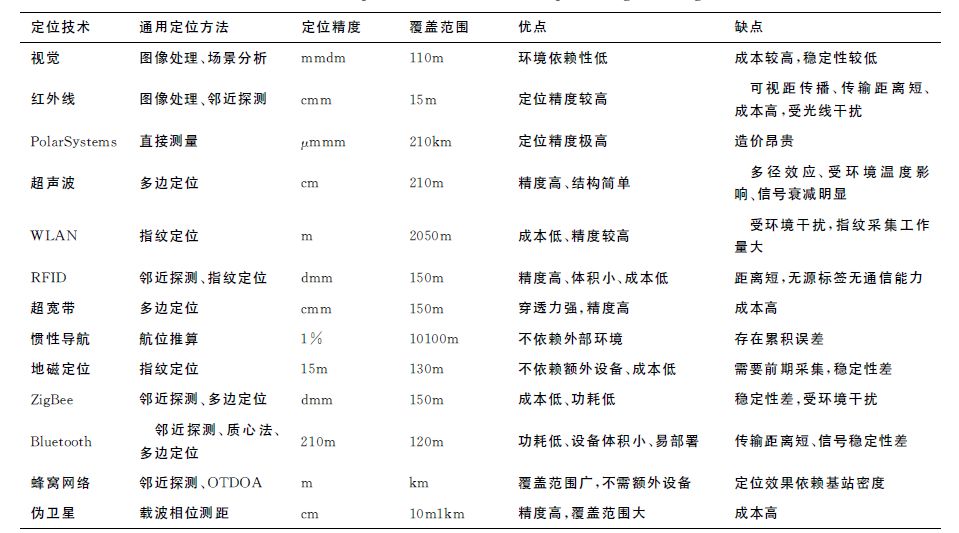
There are various technical branches for indoor positioning. The following figure is a comparison of various indoor positioning solutions:
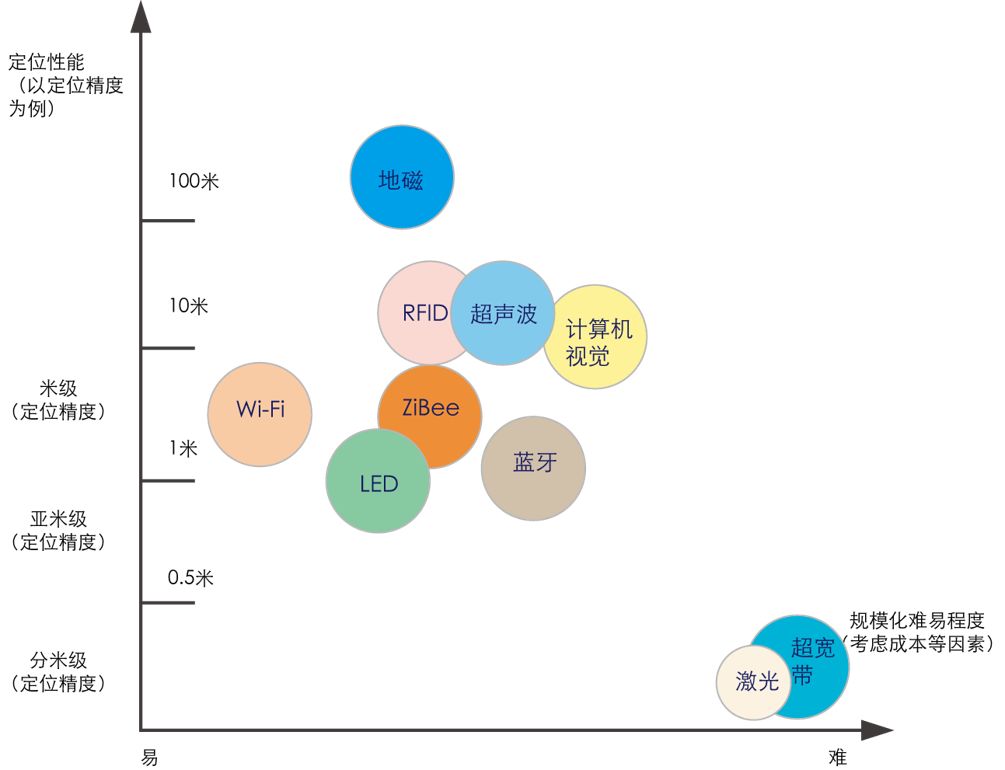
At present, the commonly used positioning methods for indoor positioning are mainly divided into seven types: proximity detection method, centroid positioning method, multilateral positioning method, triangulation method, pole method, fingerprint positioning method and dead reckoning algorithm.
| Positioning principle | description | Characteristics |
| Proximity detection | Through the reception of some limited physical signals, it is judged whether the mobile device appears near a certain transmission point. | Although this method can only provide approximate positioning information, it is low in cost and easy to set up, and is suitable for some applications that do not require high positioning accuracy, such as automatic identification system for employee sign-in of the company. |
| Centroid localization | The centroid coordinates are calculated as coordinates of the mobile device based on all known beacon locations within the signal range of the mobile device. | The method is easy to understand, the calculation amount is small, and the positioning accuracy depends on the layout density of the beacon. |
| Multilateral positioning | The position of the target to be tested is determined by measuring the distance between the target to be measured and the known reference point. | High precision and wide application. |
| Triangulation | The method can determine the position of the target to be tested by obtaining the angle of the target relative to the two known reference points and combining the distance information between the two reference points to determine a unique triangle. | High precision and wide application. |
| Pole method | The position of the point to be measured is determined by measuring the distance and angle relative to a known reference point. | This method only needs to know the position coordinates of a reference point, so it is very convenient to use and has been widely used in geodetic survey. |
| Fingerprint localization | The fingerprint database is established in the positioning space, and the positioning is realized by comparing the actual information with the parameters in the database. | The advantage of fingerprint positioning is that there is almost no need to refer to the measurement point, and the positioning accuracy is relatively high; but the disadvantage is that the workload of establishing the fingerprint database offline in the early stage is huge, and it is difficult to adapt to the scene with large environmental changes. |
| Dead reckoning algorithm | Based on the known last position, the current position is calculated by calculation or known motion speed and time. | The data is stable and has no dependence, but there is a cumulative error in the method, and the positioning accuracy deteriorates with time. |
Different indoor positioning methods select different observations and extract the information needed by the algorithm through different observations. The table below provides a brief introduction to the main observations.
| Observation measurement | Introduction |
| RSSI measurement | It calculates the propagation loss of the signal, and can use theoretical or empirical models to convert the propagation loss into distance. It can also be used for fingerprint location to establish a fingerprint database. |
| TOA measurement | The method mainly measures the one-way propagation time or the back-to-back propagation time of the signal between the base station and the mobile station. The former requires clock synchronization between the base station and the mobile station. |
| TDOA measurement | The method also measures the signal arrival time, but uses the arrival time difference to perform the positioning calculation, and the hyperbolic intersection can be used to determine the position of the mobile station, so that accurate synchronization between the base station and the mobile station can be avoided. |
| AOA measurement | The method refers to the receiver measuring the incident angle of the electromagnetic wave through the antenna array, including measuring the angle of the base station signal to the mobile station or the angle at which the mobile station signal reaches the base station. Each way produces a direction line from the base station to the mobile station. Two base stations can get two direction lines, and the intersection point is the mobile station position. Therefore, the AOA method requires only two base stations to determine the location of the mobile station. |
| Direction and distance | The acquisition direction and distance are mostly used for dead reckoning and positioning. The physical information of the self-contained sensor record carrier is used to calculate the direction and distance, so that the current position is calculated based on the known last position. |
According to the positioning principle and observation measurement described above, a variety of indoor positioning technologies have been derived. The following is a brief introduction to the mainstream indoor positioning technology.
1.WiFi positioning technology
At present, WiFi is a relatively mature and widely used technology. In recent years, many companies have invested in this field. There are two main types of WiFi indoor positioning technology.
WiFi positioning is generally judged by the "near neighbor method", that is, which hot spot or base station is closest, that is, at what position, if there are multiple sources nearby, cross positioning (triangulation) can be used to improve positioning accuracy.
Since WiFi has become popular, there is no need to lay special equipment for positioning. When a user turns on Wi-Fi or a mobile cellular network while using a smartphone, it may become a data source. This technology has the advantage of being easy to expand, automatically updating data, and low cost, so it is the first to achieve scale.
However, WiFi hotspots are more affected by the surrounding environment and have lower precision. In order to do a good job, the company did a WiFi fingerprint collection, recorded a huge amount of signal strength at a certain location point in advance, and determined the location by comparing the database with the huge amount of data with the signal strength of the newly added device.
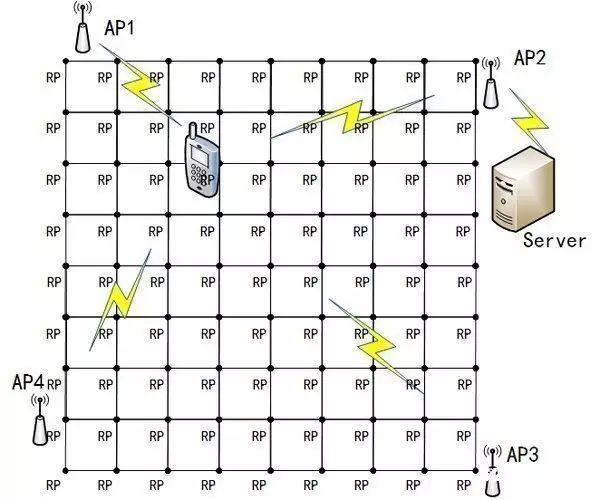
Because the collection work requires a large number of personnel to carry out, and regular maintenance, the technology is difficult to expand, few companies can regularly update the fingerprint data in so many shopping malls in China.
WiFi positioning can achieve complex large-scale positioning, but the accuracy can only reach about 2 meters, and it is impossible to achieve precise positioning. Therefore, it is suitable for positioning and navigation of people or vehicles, and can be used in various places where medical navigation, theme parks, factories, shopping malls, and the like need to be positioned and navigated.
2.FRID positioning
The basic principle of RFID positioning is to read the feature information of the target RFID tag (such as identity ID, received signal strength, etc.) through a fixed set of readers, and also determine the tag by neighboring method, multilateral positioning method, and received signal strength. location.
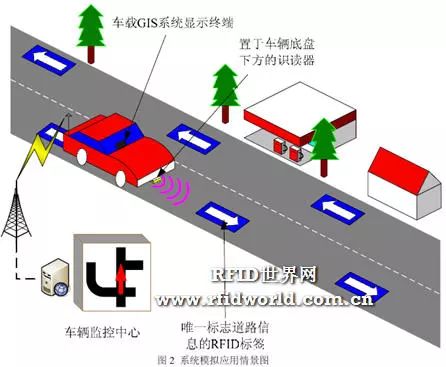
This technology has a short working distance and is generally up to several tens of meters. However, it can obtain centimeter-level positioning accuracy information within a few milliseconds, and the transmission range is large and the cost is low. At the same time, due to its non-contact and non-line-of-sight advantages, it is expected to be the preferred indoor positioning technology.
At present, the hotspots and difficulties in radio frequency identification research are the establishment of theoretical communication models, user privacy and international standardization. The advantage is that the volume of the logo is relatively small, the cost is relatively low, but the range of action is close, there is no communication capability, and it is not easy to integrate into other systems, and it is impossible to accurately locate. It requires a lot of engineering practice to arrange the card reader and the antenna. The experience is difficult.
3. Infrared technology
Infrared is an electromagnetic wave with a wavelength between a radio wave and a visible wave. There are two specific implementation methods for infrared positioning. One is to attach an electronic tag that emits infrared rays to the positioning object, and measure the distance or angle of the signal source through multiple infrared sensors placed indoors to calculate the position of the object.
This method is easy to achieve high precision in an open room, and can achieve passive positioning of the infrared radiation source, but the infrared is easily blocked by obstacles and the transmission distance is not long, so a large number of densely deployed sensors are required, resulting in higher hardware. And construction costs. In addition, the infrared is easily disturbed by heat sources, lights, etc., resulting in a decrease in positioning accuracy and accuracy.
The technology is currently mainly used for passive positioning of infrared radiation sources such as aircraft, tanks, and missiles in military applications, and is also used for positional positioning of indoor self-propelled robots.
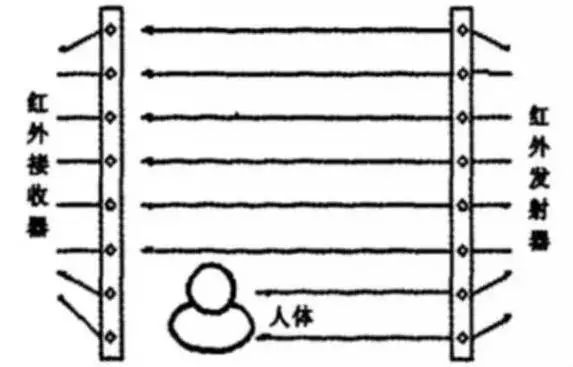
Another method of infrared positioning is an infrared woven mesh, that is, an infrared ray woven by a plurality of pairs of transmitters and receivers covers the space to be tested, and directly positions the moving target.
The advantage of this method is that it does not require any positioning object to carry any terminal or label, which is concealed and is often used in the security field. The disadvantage is that to achieve high precision positioning requires the deployment of a large number of infrared receivers and transmitters, the cost is very high, so only a high level of security will use this technology.
4. Ultrasonic technology
Most of the ultrasonic positioning currently uses the reflective ranging method. The system consists of a main range finder and several electronic tags. The main range finder can be placed on the mobile robot body, and each electronic tag is placed in a fixed position in the indoor space.
The positioning process is as follows: first, the host computer sends the same frequency signal to each electronic tag, and the electronic tag is reflected and transmitted to the main range finder, so that the distance between each electronic tag and the main range finder can be determined, and Positioning coordinates.
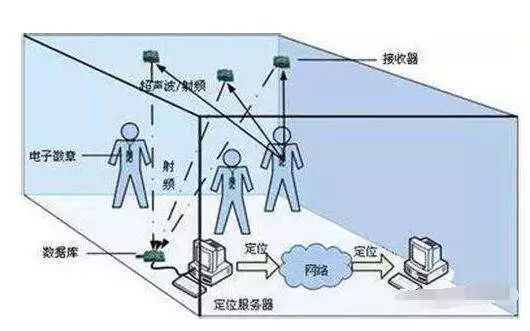
At present, there are two popular techniques for ultrasonic indoor positioning: one is to combine ultrasonic and radio frequency technology for positioning. Since the radio frequency signal transmission rate is close to the speed of light and much higher than the radio frequency rate, the radio frequency signal can be used to activate the electronic tag and then receive the ultrasonic signal, and the time difference is used to measure the distance. This technology has low cost, low power consumption and high precision. The other is multi-ultrasonic positioning technology. The technology adopts global positioning, and four ultrasonic sensors can be installed on the mobile robot body, the space to be positioned is partitioned, the coordinates are formed by the ultrasonic sensor, the overall data is grasped, the anti-interference is strong, the precision is high, and the robot can be solved. Lost problem.
The ultrasonic positioning accuracy can reach centimeter level and the precision is relatively high. The defect is that the ultrasonic wave attenuates significantly during transmission and affects its effective range of positioning.
5. Bluetooth technology
Bluetooth positioning is based on the RSSI (Received Signal Strength Indication) positioning principle. According to different positioning terminals, the Bluetooth positioning mode is divided into network side positioning and terminal side positioning.
The network side positioning system is composed of a terminal (a terminal such as a mobile phone with low power consumption Bluetooth), a Bluetooth beacon node, a Bluetooth gateway, a wireless local area network, and a back end data server. The specific positioning process is:
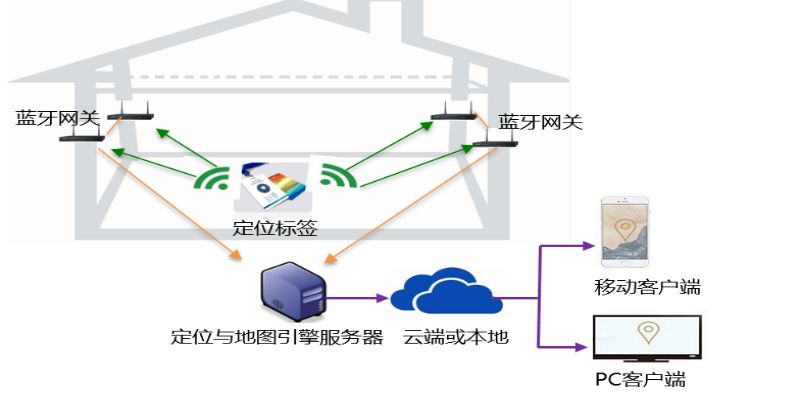
1) First place the beacon and Bluetooth gateway in the area.
2) When the terminal enters the coverage of the beacon signal, the terminal can sense the broadcast signal of the beacon, and then calculate the RSSI value under a beacon through the wifi network to the back-end data server, and calculate the calculation algorithm through the built-in server. The specific location of the terminal.
The terminal-side positioning system consists of a terminal device (such as a mobile phone embedded in an SDK package) and a beacon. The specific positioning principle is:
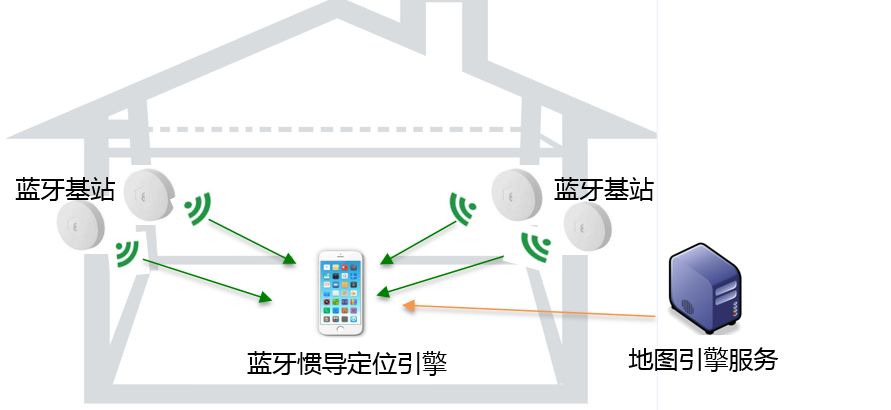
1) First lay the Bluetooth beacon in the area
2) Beacon constantly broadcasts signals and packets to the surroundings
3) When the terminal device enters the coverage range of the beacon signal, the RSSI value of the base station is measured, and then the specific location is calculated by the built-in positioning algorithm of the mobile phone.
The terminal side positioning is generally used for indoor positioning navigation, accurate location marketing and other user terminals; and the network side positioning is mainly used in the situations of personnel tracking and positioning, asset positioning and passenger flow analysis. The advantage of Bluetooth positioning is that it is simple to implement, and the positioning accuracy is closely related to the laying density and transmitting power of the Bluetooth beacon. And it is very power-saving, and can achieve power saving purposes through deep sleep, connection-free, and simple protocol.
6. Inertial navigation technology
This is a pure client-side technology, which mainly uses the motion data collected by the terminal inertial sensor, such as acceleration sensor, gyroscope, etc. to measure the speed, direction, acceleration and other information of the object. Based on the dead reckoning method, the object is obtained through various operations. location information.
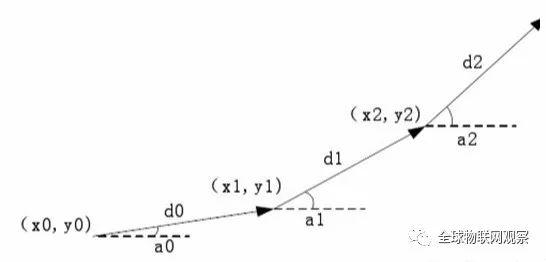
As the walking time increases, the error of inertial navigation positioning is also accumulating. It requires a more accurate data source from the outside to calibrate it. Therefore, inertial navigation is generally combined with WiFi fingerprints, and the indoor position is requested by WiFi every time, so as to correct the error generated by the MEMS. The technology is currently commercially available and is widely used in sweeping robots.
7. Ultra-wideband (UWB) positioning technology
Ultra-wideband technology is a new communication wireless technology that has been greatly different in recent years and has great differences from traditional communication technologies. It does not need to use the carrier in the traditional communication system, but transmits data by transmitting and receiving very narrow pulses with nanoseconds or less, thus having a bandwidth of the order of 3.1 to 10.6 GHz. At present, countries including the United States, Japan, Canada, etc. are studying this technology and have good prospects in the field of wireless indoor positioning.
UWB technology is a wireless technology with high transmission rate, low transmission power, strong penetration capability and based on extremely narrow pulses, without carrier. It is these advantages that make it more accurate in the field of indoor positioning.
Ultra-wideband (UWB) positioning technology utilizes pre-arranged anchor nodes and bridge nodes of known locations to communicate with newly added blind nodes and utilizes triangulation or "fingerprint" positioning to determine position.
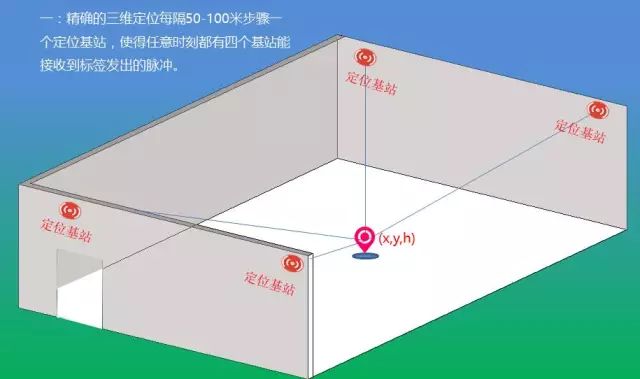
Ultra-wideband can be used for precise indoor positioning, such as location detection of battlefield soldiers, robot motion tracking, and more. Compared with the traditional narrowband system, the ultra-wideband system has the advantages of strong penetrating power, low power consumption, good anti-interference effect, high safety, low system complexity, and accurate positioning accuracy. Therefore, UWB technology can be applied to indoor stationary or moving objects as well as human positioning tracking and navigation, and can provide very accurate positioning accuracy. The accuracy can be kept from 0.1 m to 0.5 m depending on the technical means or algorithms used by different companies.
8.LED visible light technology
Visible light is an emerging field. By encoding each LED light, the ID is modulated on the light, and the light constantly emits its own ID, which is identified by using the front camera of the mobile phone. The corresponding location information is determined in the map database by using the acquired identification information, and the positioning is completed.
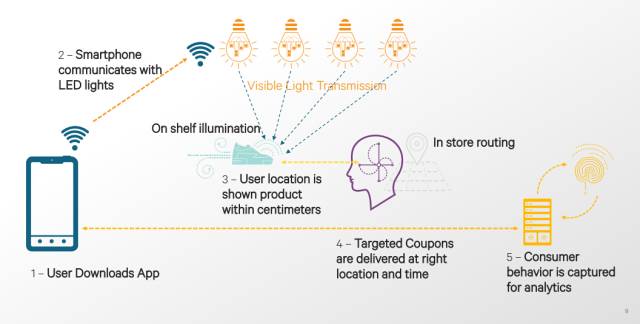
According to the angle of arrival of the light to further refine the positioning results, Qualcomm has achieved centimeter-level positioning accuracy. Since there is no need to deploy additional infrastructure, the expansion of the number of terminals has no impact on performance and can achieve a very high precision, which is optimistic about Qualcomm.
Currently, there are many stores in North America where visible light technology is already deployed. After the user downloads the application, he arrives at a certain shelf in the shopping mall, and can detect the specific location by detecting the light around the shelf, and the merchant promotes the discount of the commodity to the consumer through such a method.
9. Geomagnetic positioning technology
The Earth can be thought of as a magnetic dipole, with one pole near the geographic North Pole and the other near the geographic South Pole. The geomagnetic field consists of two parts: the basic magnetic field and the changing magnetic field. The basic magnetic field is the main part of the geomagnetic field. It originates from the interior of the earth and is relatively stable. It belongs to the static magnetic field. The changing magnetic field includes various short-term changes of the earth's magnetic field, which originate mainly from the interior of the earth and are relatively weak.
The reinforced concrete structure of modern buildings will disturb the geomagnetism in a local area, and the compass may be affected as well. In principle, a non-uniform magnetic field environment produces different magnetic field observations due to different paths. The positioning technology called IndoorAtlas uses the geomagnetic indoors to make indoor navigation, and the navigation accuracy can reach 0.1 meters to 2 meters.
However, the process of navigating using this technique is a little more troublesome. You need to upload the indoor floor plan to the map cloud provided by IndoorAtlas, and then you need to use its mobile client to record the geomagnetic field in different directions of the target location. The recorded geomagnetic data will be uploaded to the cloud by the client, so that others can use the recorded geomagnetic to perform precise indoor navigation.
Baidu invested in GeoAt positioning technology developer IndoorAtlas in 2014 and announced in June 2015 that it uses its geomagnetic positioning technology in its map application, which is used in conjunction with Wi-Fi hotspot maps and inertial navigation technology. High precision, in the promotion of commercial applications, can reach the meter-level positioning standard, but the magnetic signal is easily interfered by the changing electrical and magnetic signal sources in the environment, the positioning result is unstable, and the accuracy will be affected.
10. Visual positioning
The visual positioning system can be divided into two categories, one is to acquire the image by moving the sensor (such as a camera) to determine the position of the sensor, and the other is to fix the position of the target to be measured in the image. According to the choice of reference points, it can be divided into reference 3D building models, images, pre-deployment targets, projection targets, reference to other sensors and no reference.
The reference 3D building model and image are compared by an existing building structure database and a pre-calibrated image, respectively. In order to improve the robustness, the reference pre-deployment target uses the arranged specific image flag (such as two-dimensional code) as a reference point; the projection target is to project the reference point in the indoor environment based on the reference pre-deployment target. Other sensor data can be combined with other sensors to improve accuracy, coverage or robustness.
In addition to the above mentioned, there are dozens or even hundreds of types of positioning technologies, and each positioning technology has its own advantages and disadvantages and suitable application scenarios, and there is no absolute difference. According to the needs of the need to adapt to local deployment solutions, the best policy ~
Full-Range Speaker,Sensitivity Speaker,Fullrange Speaker,3 Inch Full-Range Speaker
Guangzhou BMY Electronic Limited company , https://www.bmy-speakers.com