The servo motor can control the speed and position accuracy very accurately, and can convert the voltage signal into torque and speed to drive the control object. The servo motor rotor speed is controlled by the input signal and can react quickly. It is used as an actuator in the automatic control system, and has the characteristics of small electromechanical time constant, high linearity, and starting voltage, which can receive the received electrical signal. Converted to an angular displacement or angular velocity output on the motor shaft. Divided into two major categories of DC and AC servo motor, its main feature is that when the signal voltage is zero, there is no rotation phenomenon, and the rotation speed decreases uniformly with the increase of torque.

DC servo motors are also available in both electromagnetic and permanent magnet types, but mostly permanent magnets. Its good control performance is mainly due to its special rotor structure. Depending on the structure, DC servo motors are available in the following types.
(1) Ordinary armature DC servo motor
This servo motor has substantially the same structure as a power direct current motor. That is, an electromagnetic or permanent magnet stator, the rotor is composed of a slotted core and an armature winding embedded in the slot. However, the length and diameter of the armature are relatively large, that is, it is a thin and long rotor. Large and medium capacity DC servo motors are generally of this type, with product capacities ranging from a few watts to hundreds of watts or even kilowatts. At the same time, due to the rotor structure, it has a strong load capacity and a large stall torque, so it is particularly useful for servo systems with large loads. However, due to the complicated structure and large volume of the rotor, the mechanical inertia (time constant) of the motor is large, the running stability is poor at low speed, and the control dead zone is large.
(2) Disc-shaped armature DC servo motor
This motor stator is of permanent magnet type. Its rotor is a disc structure (ie, a length to diameter ratio of less than 1), an armature wire wound type (wire wound type) and a printed circuit type (printed disc type). The motor has a simple structure, a small volume, and a light weight of the rotor. Therefore, the mechanical inertia of the rotor is small (the mechanical time constant of the model is less than 30 眦), but the stall torque is small. The wire wound disk motor has a capacity of several kilowatts, and the capacity of the printed disk type is smaller.
(3) Hollow cup armature DC servo motor
The rotor of the motor has a hollow cup structure as a skeleton, and an armature winding is placed (or printed) on the wall of the cup. The armature windings can be either wound windings or printed windings. The stator is permanent magnet. This servo motor is known for its mechanical inertia, high control sensitivity, almost no control dead zone, and its volume can be made very small and light. However, the stalling torque is small, and its current capacity cannot be made very large. It is a miniature servo motor.
(4) Slotless armature DC servo motor
The only difference between the slotless armature DC servo motor and the ordinary armature DC servo motor is that its rotor core is not slotted, and the armature winding is attached to the armature surface with a fixing glue. The servo motor has a large load capacity, a large stall torque, a large motor capacity, and a low speed and good stability.
(5) DC servo gear reduction motor
This servo motor is a unitary assembly of a miniature DC motor and a set of high precision gear reduction devices. The output speed of the DC servo motor is decelerated by the speed reduction mechanism. Therefore, the most important feature of this type of motor is its ability to output extremely low speeds (down to a few rpm) and very smooth operation at low speeds. It is especially suitable for low speed and high torque systems.
(6) DC torque motor
The DC torque motor is a low speed, high torque servo motor. It can directly drag the load without the intermediate deceleration mechanism to achieve smooth running of low speed and large torque, and even work in the case of stalling without creeping, and has high steady speed accuracy. Therefore, it is especially suitable for those applications that are often used for lower speeds and have considerable load capacity requirements. The DC torque motor is identical in construction to a conventional armature DC servo motor. Its stator has a large number of main poles (usually 6.8 poles), which is usually made of a flat structure, and the ratio of armature length to diameter is generally only about 0.2 (that is, the appearance is disc-shaped). It is available in both built-in and split-package configurations. The built-in type is assembled into a whole by the manufacturer as the general motor. The sub-assembly type separates the stator, the rotor and the brush from the factory. When assembled, the machine is assembled on site, and the rotor is directly placed on the load shaft. The casing can be selected according to the needs.

The armature equivalent circuit of the DC servo motor using armature voltage control is shown in Figure 1.
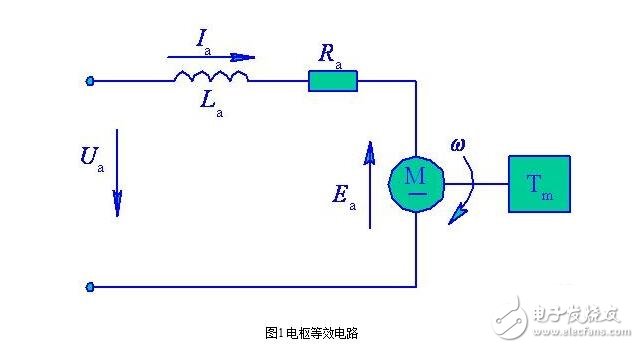
When the motor is in steady state operation, the current Ia in the loop remains unchanged, then the voltage balance equation in the armature loop is
Ea=Ua-IaRa? (6-1)
Where Ea is the armature counter electromotive force; Ua is the armature voltage; Ia is the armature current; and Ra is the armature resistance.
When the rotor cuts magnetic lines of force at an angular velocity ω in a magnetic field, the following relationship exists between the armature counter electromotive force Ea and the angular velocity ω:
Ea=CeΦω (6-2)
Where, Ce is the electromotive force constant, which is only related to the structure of the motor; Φ is the air gap flux of each pole in the stator magnetic field.
From equations (6-1) and (6-2)
Ua-IaRa=CeΦω(6-3)
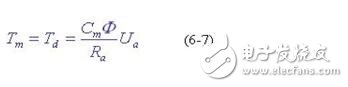
In addition, the electromagnetic torque Tm generated by the armature current cutting magnetic field lines can be expressed by the following formula:
Tm=CmΦIa
Then Tm=CmΦIn

Where Cm is the torque constant and is only related to the motor structure.
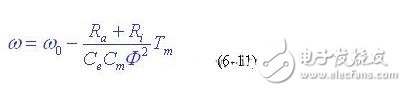
Substituting equation (6-4) into equation (6-3) and sorting it, can obtain the general expression of the operating characteristics of DC servo motor.
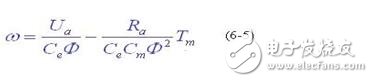
This gives the characteristics of the motor at no load (Tm = 0, negligible rotor inertia) and motor start (ω = 0):
(1) When Tm=0, there is

(2) When ω = 0, there is
In the formula, Td is called the starting instantaneous torque, and its value is also proportional to the armature voltage. ?
If the angular velocity ω is regarded as a function of the electromagnetic torque Tm, that is, ω=f(Tm), the mechanical characteristic expression of the DC servo motor can be obtained as
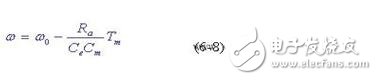
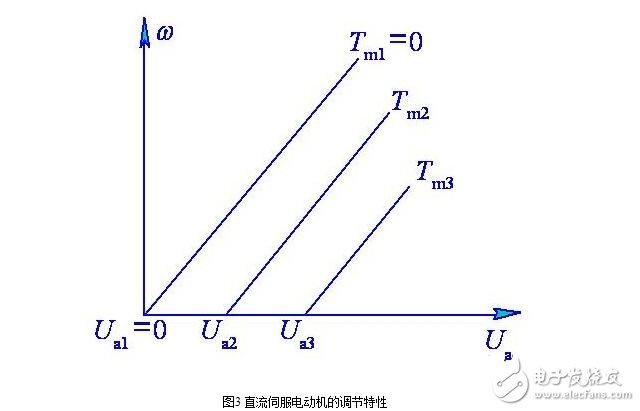
If the angular velocity ω is regarded as a function of the armature voltage Ua, that is, ω=f(Ua), the expression of the regulation characteristic of the DC servo motor can be obtained.
According to formula (6-8) and formula (6-9), given the different Ua values ​​and Tm values, the mechanical characteristic curve and the adjustment characteristic curve of the DC servo motor can be respectively plotted as shown in Fig. 2 and Fig. 3.
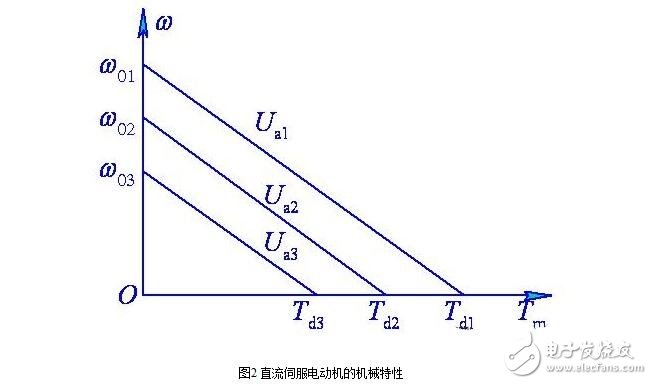
It can be seen from Fig. 2 that the mechanical characteristics of the DC servo motor are a set of straight clusters with the same slope. Each mechanical characteristic corresponds to an armature voltage, the intersection with the ω axis is the ideal no-load angular velocity at the armature voltage, and the intersection with the Tm axis is the starting torque at the armature voltage.
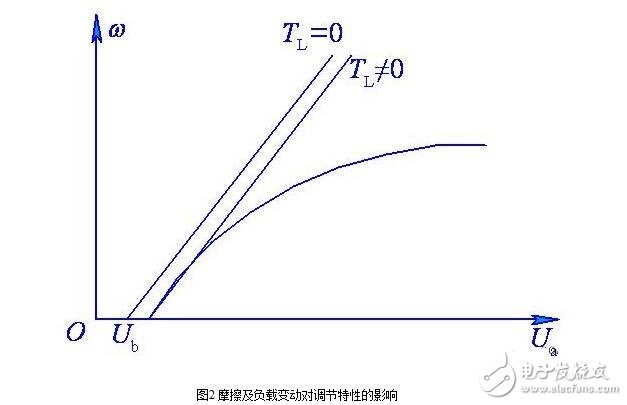
It can be seen from Fig. 3 that the adjustment characteristic of the DC servo motor is also a set of straight clusters with the same slope. Each adjustment characteristic corresponds to an electromagnetic torque, and the intersection with the Ua axis is the armature voltage at startup. ?
It can also be seen from the figure that the slope of the regulation characteristic is positive, indicating that under a certain load, the motor speed increases with the increase of the armature voltage; while the slope of the mechanical characteristic is negative, indicating that when the armature voltage is constant, The motor speed decreases as the load torque increases.
Factors affecting the characteristics of DC servo motorsThe analysis of the characteristics of the DC servo motor is carried out under ideal conditions. In fact, the driving circuit of the motor, the friction inside the motor and the variation of the load have an influence on the characteristics of the DC servo motor.
(1) The influence of the drive circuit on the mechanical characteristics
The DC servo motor is powered by the drive circuit. Assuming that the internal resistance of the drive circuit is Ri, and the control voltage applied across the armature winding is Uc, the armature equivalent circuit shown in Figure 1 can be drawn. In this armature equivalent loop, the voltage balance equation is
Ea=Uc-Ia(Ra+Ri) (6-10)
Then, after considering the influence of the drive circuit, the mechanical characteristic expression of the DC servo motor becomes
The mechanical characteristic curve becomes steep due to the presence of the internal resistance Ri of the driving circuit. Fig. 1 shows the mechanical characteristics under the influence of the internal resistance of the driving circuit.
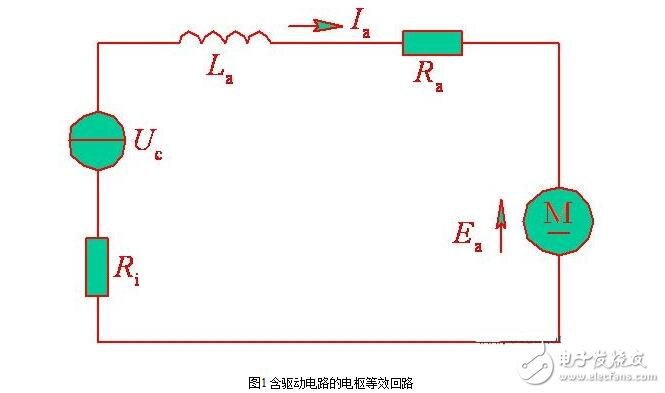
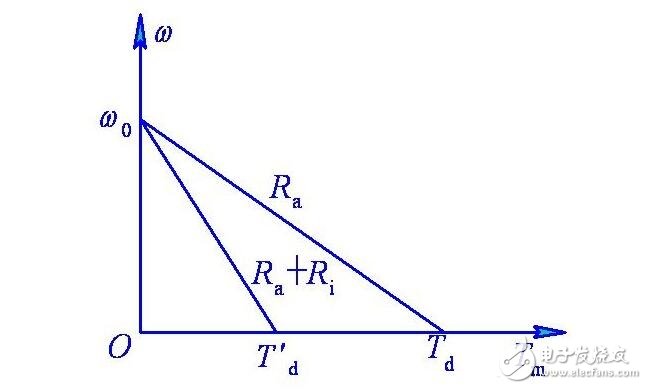
If the mechanical characteristics of the DC servo motor are relatively flat, when the load torque changes, the corresponding speed change is small, and the mechanical characteristics of the DC servo motor are said to be hard. On the other hand, if the mechanical characteristics are steep, when the load torque changes, the corresponding rotational speed changes greatly, and the mechanical characteristics are said to be soft. Obviously, the harder the mechanical characteristics, the stronger the load capacity of the motor; the softer the mechanical characteristics, the lower the load capacity. There is no doubt that for DC servo motor applications, the mechanical properties are as hard as possible. It can be seen from Fig. 1 that the mechanical characteristics of the motor become soft due to the internal resistance of the power amplifier circuit, and this effect is unfavorable. Therefore, when designing the DC servo motor power amplifier circuit, it is necessary to reduce the internal resistance.
(2) Effect of friction inside DC servo motor on regulation characteristics
It can be seen from Fig. 1 that the DC servo motor is at an ideal no-load (ie, Tm1 = 0), and its adjustment characteristic curve starts from the origin. However, in fact, there is friction inside the DC servo motor (such as friction between the rotor and the bearing). The DC servo motor needs to overcome a certain friction torque when starting, so the armature voltage cannot be zero at startup. This non-zero voltage is called the startup voltage and is represented by Ub, as shown in Figure 2.
(3) Influence of load variation on adjustment characteristics
It is known from equation (6-5) that the angular velocity of the DC servo motor is linear with the armature voltage under the condition that the load torque TL is constant. However, in the actual servo system, the load often fluctuates with the rotation speed. For example, the viscous frictional resistance increases with the increase of the rotational speed. The cutting force during the cutting process of the CNC machine tool also changes with the feed speed. At this time, the variation of the load will cause the nonlinearity of the adjustment characteristic, as shown in FIG. 2. It can be seen that due to the influence of load fluctuation, when the armature voltage Ua increases, the rate of change of the angular velocity ω of the DC servo motor becomes smaller and smaller, which should be taken care of in the variable load control.
CBD Vape Pod
Shenzhen Xcool Vapor Technology Co.,Ltd , http://www.xcoolvapor.com