With the development of automotive electronics in the direction of intelligence, standardization and networking, the proportion of software development in product development continues to increase. The use of platform-based design methods to reduce costs, shorten development time and make full use of existing resources has become a The inevitable trend.
At present, the major automotive electronic software development standards are AUTOSAR, MISRA and OSEK. Based on the existing standards and platforms, the CCNT laboratory of Zhejiang University has developed the SMARTCAR automotive electronics software platform, including the smart car platform and automotive electronics software development platform. 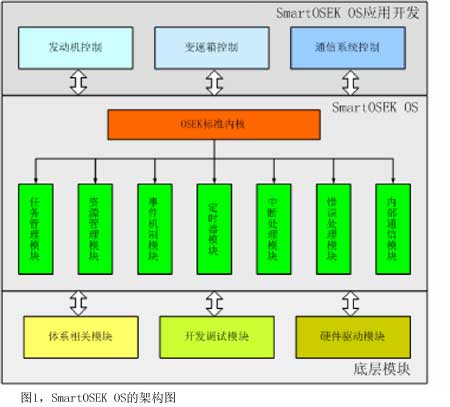
Mr. Wu Zhaohui, Vice President of Zhejiang University, is also the academic leader of CCNT. He introduced that including the adaptive middleware platform ScudWare for smart cars and a smart car space prototype system developed on this basis, the vehicle processing center, each A computing environment composed of a variety of context collection devices and a series of remote Web servers. The main purpose is to automatically provide appropriate services based on user settings or current environmental characteristics, reduce the number of active user service requests, and form a spontaneous, The customized service space provides users with a safe and comfortable driving environment. The automotive electronic software development platform SmartOSEK mainly includes the high-reliability and strong real-time embedded operating system kernel SmartOSEK OS, the board-level support architecture SmartOSEK BSS that supports services, and the SmartOSEK IDE, a graphical development environment that supports model-based design. Focus on solving the problem of demand for operating systems of complex automotive electronics applications, modeling and description problems for the automotive field, validation of vehicle control software, automatic generation of documents and codes during development, through model-based software development ideas Change the traditional development methods of embedded systems, ultimately improve the efficiency and product quality of automotive electronic control system product development, and reduce development costs.
The structure of SmartOSEK
The SmartOSEK standard focuses on the OSEK OS, OSEK OIL, OSEK COM, and OSEK NM standards. The AUTOSAR standard, for now, mainly draws on its Architecture's CommunicaTIon Stack, RTE, System Services, Peripherals standards and MethodologyAndTools, ApplicaTIon InteRFaces related parts. The MISRA standard mainly draws on its 127 rules for automotive electronic safety codes.
Embedded real-time operating system SmartOSEK OS
SmartOSEK is composed of three parts: operating system, board support, and development tools. The operating system part of SmartOSEK OS is implemented in strict accordance with the OSEK / VDX specifications, and it is the first embedded in China that conforms to the OSEK specification and is certified by the official OSEK organization. Real-time operating system.
SmartOSEK OS strictly implements the kernel modules specified by the OSEK standard, including task management module, resource management module, event mechanism module, timer module, interrupt processing module, error processing module, internal communication module, etc.
The SmartOSEK kernel module needs the support of the underlying modules, including system-related modules, development and debugging modules, and hardware driver modules. The system-related modules implement closely related parts of the system, such as context switching, etc .; the development and debugging module implements monitoring, tracking and debugging of applications for specific platforms; and the hardware driver module includes drivers for various research peripherals. The application development of SmartOSEK OS is mainly for automotive electronic control systems, including engine control, gearbox control, and communication system control. Figure 1 is the architecture diagram of SmartOSEK OS.
SmartOSEK OS can meet strict on-chip memory requirements, and the core is between 4KB and 12KB (32-bit PowerPC platform); the context switching time of SmartOSEK OS on MPC555 with a main frequency of 40M is in microseconds; the maximum interrupt mask time is 21.72 μs; up to 40kHz interruption. Board level support SmartOSEK BSS
Board-level support SmartOSEK BSS is an open and universal platform that shields specific hardware details and provides services to upper-level operating systems and applications through APIs, so that operating systems and applications are hardware-independent. For the new hardware platform, as long as SmartOSEK BSS can be realized, then the upper layer software can be easily transplanted. At the same time, SmartOSEK BSS should also be able to be used on different development platforms. Although its specific implementation may be different, the interface is unified.
Referring to the division of software systems in the AUTOSAR standard, the board-level support platform adopts a hierarchical structure design, which is divided into a microcontroller abstraction layer and an ECU abstraction layer. At the same time, the entire board-level support platform is divided into four modules according to functions.
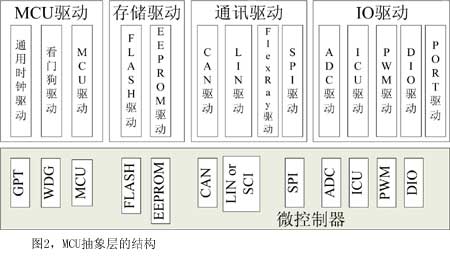
The MCU abstraction layer contains various drivers, which are divided into four parts according to functional characteristics: IO driver, communication driver, storage driver and microcontroller driver. They are software modules that are used to directly access peripherals within the microcontroller or external devices that are memory mapped to the microcontroller. The structure of the MCU abstraction layer is shown in Figure 2.
The ECU abstraction layer contains drivers for external devices connected to the microcontroller via a network. The ECU abstraction layer is also divided into four parts: IO hardware abstraction, communication hardware abstraction, storage hardware abstraction, and on-board device abstraction.
Integrated Development Environment SmartOSEK IDE
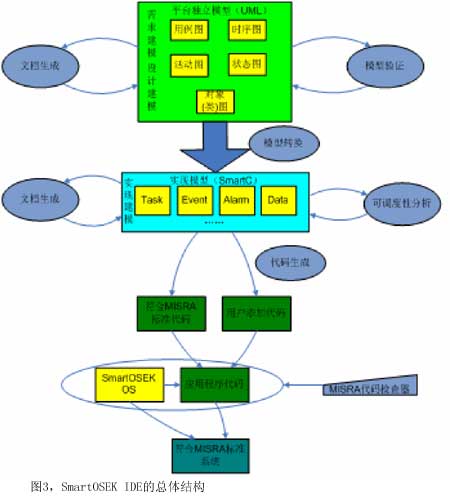
SmartOSEK IDE is an integrated development environment for automotive electronics applications that supports the SmartOSEK operating system. It fully draws on the model-driven design ideas and provides UML requirements modeling, SmartC algorithm modeling, state diagram model verification, system schedulability analysis, automatic code generation, and automatic documentation around the V-shaped process in the field of automotive electronics software development. Generate a complete set of development tool chains. The overall structure of SmartOSEK IDE is shown in Figure 3.
According to the model-driven development process, the first is UML requirements modeling and structural modeling, and UML model verification to determine whether the design meets the requirements. SmartOSEK IDE provides model conversion tools to directly convert UML models into SmartC models, and conduct specific algorithm modeling on SmartC models. After the model is established, the schedulability can be analyzed to ensure that the model meets the schedulability requirements. Finally, it can automatically generate high-quality C code and word format documents that conform to the MISRA standard for the target platform.
SmartC is a system description language for the automotive electronics field independently developed by the Embedded System Engineering Center (ESE) of the CCNT Laboratory of Zhejiang University, and it complements UML. The core of SmartC is its hierarchical modeling method. From top to bottom, the system design is divided into five levels: system level, component level, task level, subtask level, and component level. The system layer is concerned with the structure and requirements of the entire system, the component layer is concerned with the system's functional requirements and software deployment, the task layer is concerned with the implementation of the system, and the component layer is concerned with the implementation of control algorithms.
SmartOSEK IDE supports automatic generation of application C code for SmartOSEK OS from the model. The generated C code can be directly compiled and run together with SmartOSEK OS without manual modification. SmartOSEK IDE provides a code checker that conforms to the MISRA standard for code that users manually write in the model.
Automatic generation technology is an important means to improve the efficiency of software development. SmartOSEK IDE automatic generation tools include automatic generation of program code and automatic generation of design documents. Automatic generation of program code According to the design of the system model and the configuration file of the system, the pre-made program code can be quickly combined into an actual application system, which can automatically complete the system framework. The prefabricated code includes various reused components, various drivers, and operating systems. The more prefabricated code, the higher the efficiency of automatic code generation. The automatic generation of design documents refers to the automatic generation of related design documents according to the designed system model. Automatic generation technology can eliminate the barriers between the various stages of traditional software development methods, reduce problems and improve efficiency. Another great advantage of automatic generation technology is that it can keep the generation source and generation target synchronized, that is, the model and code can be updated simultaneously, which is very good to maintain the consistency of the system.
For different hardware platforms, SmartOSEK IDE provides a configuration tool to configure and select before automatically generating code. After configuration, it can automatically generate code that is suitable for running on different platforms. The automatically generated code framework is pre-made for different platforms in advance and has been optimized accordingly.
When people search gaming laptop, indicates that they need high performance 15 Inch Gaming Laptop, comes with big screen size, high cpu, large memory and storage, high resolution display, quality bigger 12000mAh battery, 2MP Camera, etc. 15 or 14 inch 500 Dollar Gaming Laptop, 10th generation laptop, 11th gen gaming laptop, 12th generation laptop, Laptop Intel Core I7, Intel I5 Laptop are the Top 10 Gaming Laptops. Every gamer want to buy Gaming Laptop with higher processors, big 8GB, 12GB, 16GB system memory ram, large Solid State Drive so that can handle or storage digital data at a high speed, 1920*1080 Full HD Slimmer screen provides user stunning vivid visuals, fingerprint reader, backlight keyboard, etc.
Nowadays 11th Laptop is the most competitive cpu, cause performance is better than 10th, but price is nearly same; besides, Solid State Drive cost 512GB is the most welcome and competitive one.
Of course, You can also contact us directly and share your exact requirements, so that we can send the right and valuable information quickly.
Gaming Laptop,Top 10 Gaming Laptops,500 Dollar Gaming Laptop,15 Inch Gaming Laptop,Buy Gaming Laptop
Henan Shuyi Electronics Co., Ltd. , https://www.shuyioemminipc.com